伺服電機如何選擇脈沖、模擬量、通訊三種控制方式?
伺服電機控制方式有脈沖、模擬量和通訊這三種,在不同的應用場景下,我們該如何選擇伺服電機的控制方式呢?
一、伺服電機脈沖控制方式
在一些小型單機設備,選用脈沖控制實現電機的定位,應該是最常見的應用方式,這種控制方式簡單,易于理解。
基本的控制思路:脈沖總量確定電機位移,脈沖頻率確定電機速度。選用了脈沖來實現伺服電機的控制,翻開伺服電機的使用手冊,一般會有如下這樣的表格:
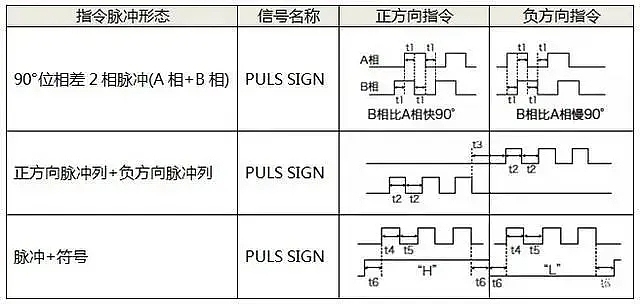
都是脈沖控制,但是實現方式并不一樣:
第一種,驅動器接收兩路(A、B路)高速脈沖,通過兩路脈沖的相位差,確定電機的旋轉方向。如上圖中,如果B相比A相快90度,為正轉;那么B相比A相慢90度,則為反轉。
運行時,這種控制的兩相脈沖為交替狀,因此我們也叫這樣的控制方式為差分控制。具有差分的特點,那也說明了這種控制方式,控制脈沖具有更高的抗干擾能力,在一些干擾較強的應用場景,優先選用這種方式。但是這種方式一個電機軸需要占用兩路高速脈沖端口,對高速脈沖口緊張的情況,比較不適用。
第二種,驅動器依然接收兩路高速脈沖,但是兩路高速脈沖并不同時存在,一路脈沖處于輸出狀態時,另一路必須處于無效狀態。選用這種控制方式時,一定要確保在同一時刻只有一路脈沖的輸出。兩路脈沖,一路輸出為正方向運行,另一路為負方向運行。和上面的情況一樣,這種方式也是一個電機軸需要占用兩路高速脈沖端口。
第三種,只需要給驅動器一路脈沖信號,電機正反向運行由一路方向IO信號確定。這種控制方式控制更加簡單,高速脈沖口資源占用也最少。在一般的小型系統中,可以優先選用這種方式。
二、伺服電機模擬量控制方式
在需要使用伺服電機實現速度控制的應用場景,我們可以選用模擬量來實現電機的速度控制,模擬量的值決定了電機的運行速度。
模擬量有兩種方式可以選擇,電流或電壓。
電壓方式:只需要在控制信號端加入一定大小的電壓即可,在有些場景甚至使用一個電位器即可實現控制,非常的簡單。但選用電壓作為控制信號,在環境復雜的場景下,電壓容易被干擾,造成控制不穩定。
電流方式:需要對應的電流輸出模塊,但電流信號抗干擾能力強,可以使用在復雜的場景。
三、伺服電機通信控制方式
采用通信方式實現伺服電機控制的常見方式有CAN、EtherCAT、Modbus、Profibus。使用通信方式來對電機進行控制,是目前一些復雜、大系統應用場景首選的控制方式。在這種方式下,系統的大小、電機軸的多少都易于裁剪,沒有復雜的控制接線。搭建的系統具有極高的靈活性。
四、拓展部分
1、伺服電機轉矩控制
轉矩控制方式是通過外部模擬量的輸入或直接的地址的賦值來設定電機軸對外的輸出轉矩的大小,具體表現為例如10V對應5Nm的話,當外部模擬量設定為5V時電機軸輸出為2.5Nm。如果電機軸負載低于2.5Nm時電機正轉,外部負載等于2.5Nm時電機不轉,大于2.5Nm時電機反轉(通常在有重力負載情況下產生)。可以通過即時的改變模擬量的設定來改變設定的力矩大小,也可通過通訊方式改變對應的地址的數值來實現。
主要應用在對材質受力有嚴格要求的纏繞和放卷裝置中,例如繞線裝置或拉光纖設備,轉矩的設定要根據纏繞的半徑的變化隨時更改以確保材質的受力不會隨著纏繞半徑的變化而改變。
2、伺服電機位置控制:
位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉動速度的大小,通過脈沖的個數來確定轉動的角度,也有些伺服可以通過通訊方式直接對速度和位移進行賦值。由于位置模式可以對速度和位置都有很嚴格的控制,所以一般應用于定位裝置,數控機床、印刷機械等等。
3 、伺服電機速度模式:
通過模擬量或脈沖頻率的輸入都可以進行轉動速度的控制,在有上位控制裝置的外環PID控制時速度模式也可以進行定位,但必須把電機的位置信號或直接負載的位置信號給上位機反饋以做運算用。位置模式也支持直接負載外環檢測位置信號,此時的電機軸端的編碼器只檢測電機轉速,位置信號就由直接的最終負載端的檢測裝置來提供了,這樣的優點在于可以減少中間傳動過程中的誤差,增加了整個系統的定位精度。
4、談談3環
伺服一般為三個環控制,所謂三環就是3個閉環負反饋PID調節系統。最內的PID環就是電流環,此環完全在伺服驅動器內部進行,通過霍爾裝置檢測驅動器給電機的各相的輸出電流,負反饋給電流的設定進行PID調節,從而達到輸出電流盡量接近等于設定電流,電流環就是控制電機轉矩的,所以在轉矩模式下驅動器的運算最小,動態響應最快。
第2環是速度環,通過檢測的電機編碼器的信號來進行負反饋PID調節,它的環內PID輸出直接就是電流環的設定,所以速度環控制時就包含了速度環和電流環,換句話說任何模式都必須使用電流環,電流環是控制的根本,在速度和位置控制的同時系統實際也在進行電流(轉矩)的控制以達到對速度和位置的相應控制。
第3環是位置環,它是最外環,可以在驅動器和電機編碼器間構建也可以在外部控制器和電機編碼器或最終負載間構建要根據實際情況來定。由于位置控制環內部輸出就是速度環的設定,位置控制模式下系統進行了所有3個環的運算,此時的系統運算量最大,動態響應速度也最慢。
(來源:網絡,版權歸原作者)

 津公網安備12010102000945號
津公網安備12010102000945號