RIFTEK階梯孔內徑測量系統RF096-15/40-50/70
- 品 牌:RIFTEK
- 型 號:RF096-15/40-50/70
-
技術資料:
 RIFTEK階梯孔內徑測量系統RF096-15,40-50,70
RIFTEK階梯孔內徑測量系統RF096-15,40-50,70
- 閱讀次數:1156
產品介紹
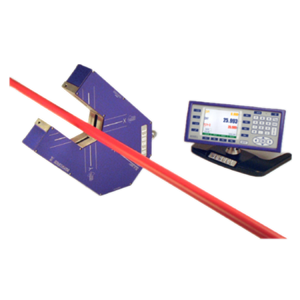
該系統的操作基于通過旋轉三角測量激光傳感器掃描孔表面。
該系統包含兩級測量頭,內部帶有三個激光傳感器。
第一級用于測量直徑為15...40 mm的孔,包含一個激光傳感器,測量范圍為距頭部軸6...21 mm。
第二級用于測量直徑為 50...70 mm 的孔,包含兩個激光傳感器,測量范圍偏移和重疊,24...31 mm 和距頭部軸線30...37 mm。
測量頭安裝在旋轉模塊上。
來自傳感器的半導體激光器的輻射聚焦到物體表面。表面反射的輻射由傳感器的輸入透??鏡收集。旋轉激光傳感器掃描物體的內表面,系統將表面的極坐標(傳感器測量到的旋轉軸的距離和相應的旋轉角度)傳輸到PC計算所需的幾何參數。
性能特點
- 該系統旨在對具有兩個不同直徑通孔的物體進行非接觸式掃描和內徑測量。
- 使用系統規格中指明的電源電壓和接口。
- 連接/斷開電纜時,須關閉系統電源。
- 不要在靠近強光源的地方使用本系統。
- 系統必須接地。
產品結構與細節

技術參數

產品尺寸



 津公網安備12010102000945號
津公網安備12010102000945號