CODA OCTOPUS實時多目標跟蹤器3D MATT
- 品 牌:CODA OCTOPUS
- 型 號:3D MATT
-
技術資料:
 CODA OCTOPUS實時多目標跟蹤器3D MATT.pdf
CODA OCTOPUS實時多目標跟蹤器3D MATT.pdf
- 閱讀次數:799
產品介紹
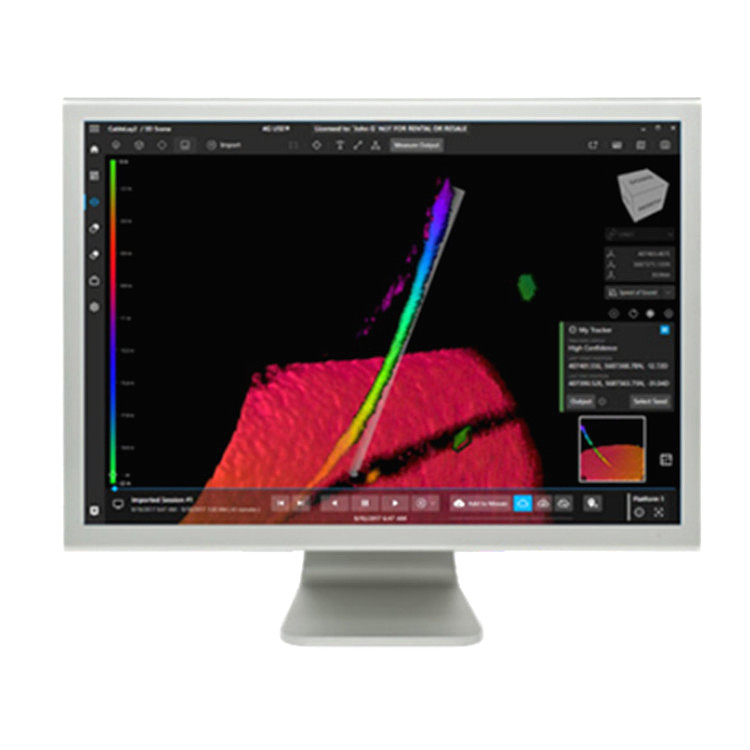
使用 3D MATT,用戶能夠定義一個在實時 3D 聲納數據中可見的要跟蹤的目標,并通過一組專門設計的約束。通過分配目標的概率范圍以及近似尺寸和速度,3D MATT 可以實時準確地跟蹤目標, Echoscope ping 速率為每秒 max.20 ping。
3D MATT 與我們的實時 3D 聲納完全對齊,任何可以被我們的聲納可視化的物體都可以成為 3D MATT 跟蹤的對象。
性能特點
- 從一個或多個 Echoscope 或 Echoscope PIPE 聲納實時跟蹤多個目標
- 目標位置、狀態和質量的實時處理和輸出,同時可視化
- 跟蹤 3D 圓柱體和已知和未知對象點簇(線和點跟蹤器)
- 實時控制跟蹤參數,整合外部定位姿態數據,實現全3D空間跟蹤解決方案
- 全自動軌跡記錄,輸出到第 3 方系統和測量點記錄(用于電纜鋪設觸地點記錄)
- 實時控制跟蹤參數,整合外部定位姿態數據,實現全3D空間跟蹤解決方案
- 全自動軌跡記錄,輸出到第 3 方系統和測量點記錄(用于電纜鋪設觸地點記錄)
- 實時跟蹤來自一個或多個 Echoscope 或 Echoscope PIPE 聲納的多個目標
技術參數
- 輸出
除了使用 Echoscope 或 Echoscope PIPE 標準軟件應用程序 Underwater Survey Explorer 和 4G USE 軟件應用程序實時可視化目標對象外,第三方測量和控制系統還可以通過串行和以太網連接同時接收實時跟蹤輸出和測量結果。也可以將數據記錄到日志文件中。當使用 LINE 跟蹤器進行電纜鋪設 Touch Down Point 監測時,除了在海底估計的交叉點外,還會輸出被跟蹤電纜的范圍。
- 外部傳感器集成
3D MATT 不僅能夠計算被跟蹤對象的實時 XYZ(3D 點),還能夠接受外部定位和姿態傳感器數據來增強或播種跟蹤數據。跟蹤具有可用深度、航向和傾斜傳感器的潛水員或水下機器人允許 3D MATT 輸出完全增強的 6DoF。
使用 USBL 或信標數據等外部低更新率定位系統進一步允許 3D MATT 系統在目標不在 Echoscope 或 Echoscope PIPE 視野范圍內時繼續輸出位置數據。一旦目標返回視野,跟蹤將以更高分辨率的更新速率自動恢復。
- 旋轉器集成
3D MATT 與 Coda Octopus 系列旋轉器(集成平移和傾斜(IPT 和集成單軸旋轉器 (ISAR))完全集成,可以根據跟蹤焦點自動控制這些傳感器。使用旋轉器選項可提供完全免提操作對于希望從靜態或移動平臺跟蹤目標的用戶。旋轉器將自動移動平移或傾斜軸以將目標保持在 Echoscope 或 Echoscope PIPE 視野內。
產品應用
3D MATT 的一個關鍵應用重點是海上風電場建設運營。 在這里,當執行電纜鋪設操作時,3D MATT 軟件可以自動跟蹤和記錄電纜接觸點,幫助在船舶移動時保持電纜上規定的安全穩定張力。 這消除了操作員手動選擇每個著陸點的需要。 該過程的自動化減少了人為錯誤,并使操作員可以將 Echoscope 或 Echoscope PIPE 數據用于其他實時決策任務,例如在決策鋪設走廊中的物體和目標的著陸點之前查看,或檢查 電纜過緊/或過緊。
3D MATT 的其他應用包括:
自動車輛對接跟蹤
挖泥頭跟蹤和監控
分區填筑
魚類跟蹤
氣體泄漏上升時間監測
小型 ROV 定位
海底建設資產降低
打樁





 津公網安備12010102000945號
津公網安備12010102000945號